



















Subkategoria 2
Subkategoria » PORADY MOTORYZACYJNE » [PM] Kąt bocznego znoszenia ogumienia. Dynamika koła samochodowego.
[PM] Kąt bocznego znoszenia ogumienia. Dynamika koła samochodowego.
- Drukuj
- 20 gru 2013
- PORADY MOTORYZACYJNE
- 135906 czytań
- 0 komentarzy
1. Czym jest kąt bocznego znoszenia ogumienia.
W tym miejscu zajmę się wyjaśnieniem czym w ogóle jest kąt bocznego znoszenia ogumienia.
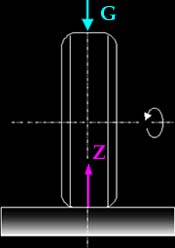
Zacznijmy zatem od zdefiniowania kąta bocznego znoszenia ogumienia. W tym celu rozważmy przypadek toczącego się koła w trakcie ruchu pojazdu. W sytuacji gdy samochód jedzie na wprost na koło nie działają żadne siły boczne (jeżeli założymy oczywiście że nie ma bocznego wiatru). Koło jest obciążone jedynie ciężarem samochodu G. Od tego ciężaru powstaje reakcja Z, o wartości i kierunku zgodnym z siłą G, lecz o przeciwnym zwrocie. Sytuację taką przedstawia pierwszy rysunek od lewej. Dokładniej omówię to w drugiej części tego poradnika.
Opis oznaczeń w tekście
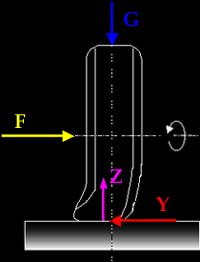
W momencie gdy do koła zostanie przyłożona siła boczna F (pochodząca np. od bocznego wiatru, lub przy skręcaniu) opona pojazdu ulegnie sprężystemu odkształceniu. Pojawi się reakcja poprzeczna Y, która przesuwa się względem środka śladu współpracy po wystąpieniu siły poprzecznej o pewną odległość s. Odległość ta jest ramieniem momentu stabilizacyjnego. Reakcja Z przesunie się i nie będzie już miała kierunku zgodnego z obciążeniem G. Taką sytuację przedstawiają dwa kolejne rysunki. Pierwszy to widok od tyłu opony, a drugi to rzut z góry.
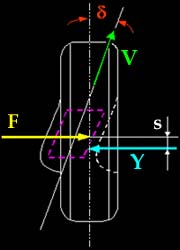
Po pojawieniu się siły bocznej wektor prędkości koła V odchyla się od kierunku wyznaczonego przez płaszczyznę symetrii koła o kąt gama. To właśnie ten kąt nazywamy kątem bocznego znoszenia ogumienia. Koło nie toczy się w swej płaszczyźnie, lecz w płaszczyźnie odchylonej o ten właśnie kąt. Zniekształcony ślad współpracy opony z nawierzchnią pokazano linią przerywaną i kolorem różowym.Im większa siła boczna tym większy kąt gama. Zależność zachodząca między siłą boczną i kątem bocznego znoszenia pokazana jest na wykresie.
W wyniku badań stwierdzono, że zależność między reakcją poprzeczną a kątem gama jest w przybliżeniu liniowa i wyraża się wzorem:
Y = k * δ
W nowoczesnych oponach zależność ta występuje jedynie przy kątach bocznego znoszenia w zakresie 3 - 4° Przy wyższych kątach pojawia się poślizg miejscowy. W chwili rozpoczęcia poślizgu kąt gama szybko wzrasta. Natomiast współczynnik k zwany współczynnikiem odporności na boczne znoszenie zależy między innymi od: rozmiarów i konstrukcji ogumienia, ciśnienia w ogumieniu, obciążenia pionowego koła oraz kąta a pochylenia koła względem nawierzchni.
2. Wpływ kąta bocznego znoszenia na sterowność pojazdu.
Skoro już wiemy czym jest kąt bocznego znoszenia ogumienia zajmijmy się wpływem jaki ma on na jazdę samochodem, z co za tym idzie na nasze bezpieczeństwo. Zacznijmy od przypomnienia czym jest sterowność - jest to zdolność utrzymania przez pojazd kierunku jazdy po torze krzywoliniowym wynikającym z ustawienia kół kierowanych.
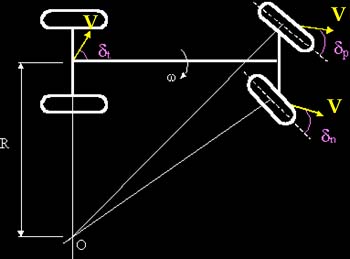
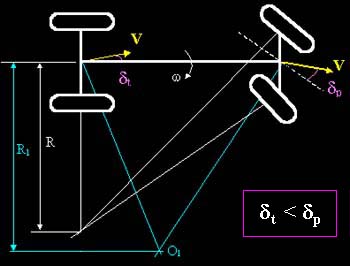
Rysunek obok przedstawia samochód pokonujący zakręt ze znaczą prędkością. Przednie koła samochodu skręcone są o różne kęty co wynika z geometrii układu kierowniczego. Jednak dla uproszenia w dalszym rozważaniu posługiwać się będziemy kątem średnim. Teoretyczny środek obrotu oznaczono przez O a promień zakrętu przez R. Długość promienia R i położenie środka obrotu O odpowiadają przypadkowi gdy nie występuje boczne znoszenie ogumienia. Zatem rysunek pokazuje sytuację braku występowania bocznego znoszenia ogumienia. W momencie, gdy uwzględnimy fakt że wskutek dużej prędkości na zakręcie występuje siła boczna wywołująca zjawisko bocznego znoszenia ogumienia sytuacja ulega zmianie. Wektory prędkości kół ulegają odchyleniu co pokazane było na wstępie. (punkt 1) Położenie chwilowego środka obrotu ulegnie teraz zmianie. Możemy wyróżnić dwa warianty jego nowego położenia. Zależą one od wielkości kąta znoszenia ogumienia kół przednich i tylnych. Dla uproszczenia rozważań nie rozpatrujemy już zmian położenia wektorów prędkości dla obu kół przednich osobno, lecz będziemy się teraz posługiwać wektorem prędkości uśrednionym i zredukowanym do osi symetrii pojazdu.
Przypadek pierwszy: Kąt bocznego znoszenia ogumienia kół tylnych jest większy niż dla kół przednich.
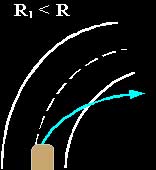
Środek chwilowego obrotu po uwzględnieniu bocznego znoszenia ogumienia O1 wyznaczamy w punkcie przecięcia się prostych prostopadłych do odchylonych wektorów prędkości V. Jak widać w tym przypadku na lewym rysunku rzeczywisty promień zakrętu R1 jest mniejszy niż promień teoretyczny R. Następuje zatem zacieśnianie zakrętu. Zjawisko to nazywane jest potocznie zjawiskiem nadsterowności. Zachowanie pojazdu nadsterownego pokazuje drugi rysunek.
Przypadek drugi: Kąt bocznego znoszenia ogumienia kół tylnych jest mniejszy niż dla kół przednich.
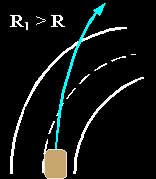
Środek chwilowego obrotu O1wyznaczamy w ten sam sposób (czyli w miejscu przecięcia się prostopadłych do odchylonych wektorów prędkości). Jak widać w tym przypadku rzeczywisty promień zakrętu R1 (tzn. po uwzględnieniu zjawiska bocznego znoszenia) jest większy od promienia teoretycznego R. Następuje zatem rozszerzanie zakrętu. Zjawisko to nazywane jest potocznie zjawiskiem podsterowności. Zachowanie się pojazdu pod sterownego obrazuje rysunek prawy.
3. Wpływ kąta znoszenia na stateczność kierunkową.
Przypomnijmy sobie czym jest stateczność kierunkowa - jest to zdolność utrzymania przez pojazd kierunku jazdy na wprost i zdolność powracania układu do stanu równowagi. Ruch auta po prostej uważa się za stateczny jeżeli po chwilowym zaburzeniu (np. w postaci podmuchu bocznego wiatru) samochód powraca do ruchu prostoliniowego. Znając już pojęcia nad i podsterowności rozpatrzymy zachowanie się takich pojazdów właśnie przy jeździe na wprost i bocznym wietrze.
Przypadek pierwszy:
Ruch na wprost samochodu nadsterownego.
Samochód porusza się po prostym odcinku drogi. Jak widać z rysunku po prawej, środek chwilowego obrotu O' znajduje się po tej samej stronie co działanie wiatru (oznaczonego jako siła Fn). Środek chwilowego obrotu wyznacza się w miejscu przecięcia się prostych prostopadłych do wektorów prędkości osi przedniej i tylnej. Widać również, że składowa siły bezwładności Fby ma ten sam kierunek co siła naporu wiatru Fn, zatem będzie ona powiększać działanie siły naporu wiatru Fn. Występuje więc sumowanie się tych sił. Są one równoważone przez siły sprężystości poprzecznej opon.

Przypadek drugi:
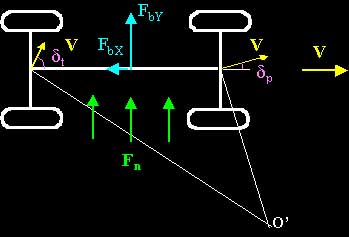
Ruch na wprost samochodu pod sterownego.
W przypadku auta pod sterownego środek chwilowego obrotu O' znajdzie się po przeciwnej stronie niż działający na pojazd boczny wiatr, a zatem składowa siły bezwładności Fby będzie przeciwdziałać sile naporu wiatru Fn. Powoduje to powrót samochodu do kierunku jazdy na wprost po ustaniu impulsu wymuszającego (bocznego wiatru). Ruch będzie zatem stateczny. Siły przyczepności opon do jezdni równoważą różnicę między Fn a Fby.
Podsumowanie
Z porównania obu powyższych rysunków wynika, że samochód pod sterowny znów pokazuje swoją wyższość nad pojazdem nadsterownym. W rzeczywistości stateczność kierunkowa samochodu przy jeździe po prostej i po krzywiźnie zależy także od wielu cech konstrukcyjnych samochodu (rozstawu osi, konstrukcji ogumienia, konstrukcji zawieszenia przedniego i tylnego). Kierowalność i stateczność nie są stałymi cechami pojazdu, lecz zmieniają się w zależności od jego załadowania i rozkładu mas, a także prędkości. Warto także wspomnieć o tym, że opony radialne są bardziej odporne na boczne znoszenie niż opony diagonalne, co jest jednym z powodów ich stosowania w samochodach osobowych.

Dynamika koła samochodowego
1.Koło swobodnie toczone
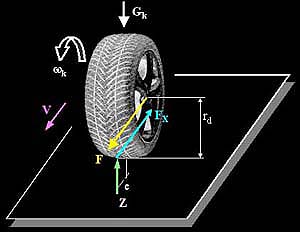
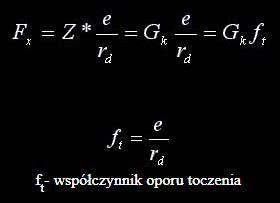
Sytuację koła swobodnie toczonego przedstawia poniższy rysunek. Koło znajduje się w ruchu jednostajnym pod działaniem siły poziomej F przyłożonej do osi. Gdyby nie występowało tarcie, koło ślizgałoby się. Ponieważ koło toczy się, stąd między nawierzchnią a kołem występuje reakcja wzdłużna Fx = F, która wywołuje moment na ramieniu promienia dynamicznego rd czyli Fx· rd zmuszający koło do obrotu. Moment ten musi być równoważony przez moment wypadkowej reakcji pionowych Z przesuniętej w stosunku do osi obrotu o wartość e, (Z · e) gdyż inne siły nie występują. Stan taki wynika z asymetrii nacisków. Ponieważ reakcja wzdłużna w miejscu styku opony z jezdnią jest równa sile przyłożonej do osi Fx=F, oraz Fx · rd = Z · e ,a wypadkowa reakcji pionowych Z jest równa obciążeniu osi (Z = Gk) to otrzymujemy po uproszczeniach wzór na siłę:
F = Fx w ruchu jednostajnym:
2.Koło napędzane
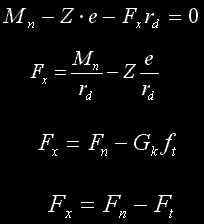
Aby mówić o przypadku koła napędzającego należy do niego przyłożyć moment napędowy Mn, jak to pokazano na rysunku. Zobaczmy co się dzieje. Siła F oraz reakcja Fx zmieniają zwroty na przeciwne niż to było w przypadku koła swobodnie toczonego. Z równania momentów względem osi pojazdu otrzymamy:
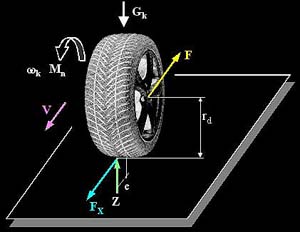
Oznaczenia są takie same jak w przypadku koła swobodnie toczonego. Dodatkowo występują:
Fn - siła napędowa
Ft - siła opór toczenia (wyprowadzona zresztą z przypadku koła swobodnie toczonego i równa Fx)
3.Koło hamowane
Jeśli zamiast momentu napędowego Mn przyłożymy do koła moment hamujący Mh to zamiast siły napędowej Fn wystąpi siła hamująca o zwrocie przeciwnym do siły napędowej Fn zgodnie z poniższym rysunkiem. Równanie momentów względem osi koła przybierze postać:
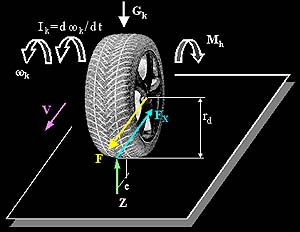
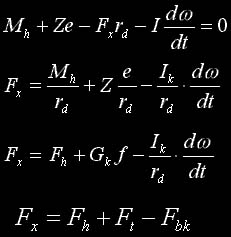
Oznaczenia są takie same jak w przypadku koła swobodnie toczonego (patrz pkt.1). Dodatkowo w przypadku koła hamowanego występują:
I = dw/dt - moment bezwładności koła
Fh - siła hamująca
Fbk - siła bezwładności koła
W tym miejscu zajmę się wyjaśnieniem czym w ogóle jest kąt bocznego znoszenia ogumienia.
Zacznijmy zatem od zdefiniowania kąta bocznego znoszenia ogumienia. W tym celu rozważmy przypadek toczącego się koła w trakcie ruchu pojazdu. W sytuacji gdy samochód jedzie na wprost na koło nie działają żadne siły boczne (jeżeli założymy oczywiście że nie ma bocznego wiatru). Koło jest obciążone jedynie ciężarem samochodu G. Od tego ciężaru powstaje reakcja Z, o wartości i kierunku zgodnym z siłą G, lecz o przeciwnym zwrocie. Sytuację taką przedstawia pierwszy rysunek od lewej. Dokładniej omówię to w drugiej części tego poradnika.
W momencie gdy do koła zostanie przyłożona siła boczna F (pochodząca np. od bocznego wiatru, lub przy skręcaniu) opona pojazdu ulegnie sprężystemu odkształceniu. Pojawi się reakcja poprzeczna Y, która przesuwa się względem środka śladu współpracy po wystąpieniu siły poprzecznej o pewną odległość s. Odległość ta jest ramieniem momentu stabilizacyjnego. Reakcja Z przesunie się i nie będzie już miała kierunku zgodnego z obciążeniem G. Taką sytuację przedstawiają dwa kolejne rysunki. Pierwszy to widok od tyłu opony, a drugi to rzut z góry.
Po pojawieniu się siły bocznej wektor prędkości koła V odchyla się od kierunku wyznaczonego przez płaszczyznę symetrii koła o kąt gama. To właśnie ten kąt nazywamy kątem bocznego znoszenia ogumienia. Koło nie toczy się w swej płaszczyźnie, lecz w płaszczyźnie odchylonej o ten właśnie kąt. Zniekształcony ślad współpracy opony z nawierzchnią pokazano linią przerywaną i kolorem różowym.Im większa siła boczna tym większy kąt gama. Zależność zachodząca między siłą boczną i kątem bocznego znoszenia pokazana jest na wykresie.
W nowoczesnych oponach zależność ta występuje jedynie przy kątach bocznego znoszenia w zakresie 3 - 4° Przy wyższych kątach pojawia się poślizg miejscowy. W chwili rozpoczęcia poślizgu kąt gama szybko wzrasta. Natomiast współczynnik k zwany współczynnikiem odporności na boczne znoszenie zależy między innymi od: rozmiarów i konstrukcji ogumienia, ciśnienia w ogumieniu, obciążenia pionowego koła oraz kąta a pochylenia koła względem nawierzchni.
2. Wpływ kąta bocznego znoszenia na sterowność pojazdu.
Skoro już wiemy czym jest kąt bocznego znoszenia ogumienia zajmijmy się wpływem jaki ma on na jazdę samochodem, z co za tym idzie na nasze bezpieczeństwo. Zacznijmy od przypomnienia czym jest sterowność - jest to zdolność utrzymania przez pojazd kierunku jazdy po torze krzywoliniowym wynikającym z ustawienia kół kierowanych.
Rysunek obok przedstawia samochód pokonujący zakręt ze znaczą prędkością. Przednie koła samochodu skręcone są o różne kęty co wynika z geometrii układu kierowniczego. Jednak dla uproszenia w dalszym rozważaniu posługiwać się będziemy kątem średnim. Teoretyczny środek obrotu oznaczono przez O a promień zakrętu przez R. Długość promienia R i położenie środka obrotu O odpowiadają przypadkowi gdy nie występuje boczne znoszenie ogumienia. Zatem rysunek pokazuje sytuację braku występowania bocznego znoszenia ogumienia. W momencie, gdy uwzględnimy fakt że wskutek dużej prędkości na zakręcie występuje siła boczna wywołująca zjawisko bocznego znoszenia ogumienia sytuacja ulega zmianie. Wektory prędkości kół ulegają odchyleniu co pokazane było na wstępie. (punkt 1) Położenie chwilowego środka obrotu ulegnie teraz zmianie. Możemy wyróżnić dwa warianty jego nowego położenia. Zależą one od wielkości kąta znoszenia ogumienia kół przednich i tylnych. Dla uproszczenia rozważań nie rozpatrujemy już zmian położenia wektorów prędkości dla obu kół przednich osobno, lecz będziemy się teraz posługiwać wektorem prędkości uśrednionym i zredukowanym do osi symetrii pojazdu.
Przypadek pierwszy: Kąt bocznego znoszenia ogumienia kół tylnych jest większy niż dla kół przednich.
Środek chwilowego obrotu po uwzględnieniu bocznego znoszenia ogumienia O1 wyznaczamy w punkcie przecięcia się prostych prostopadłych do odchylonych wektorów prędkości V. Jak widać w tym przypadku na lewym rysunku rzeczywisty promień zakrętu R1 jest mniejszy niż promień teoretyczny R. Następuje zatem zacieśnianie zakrętu. Zjawisko to nazywane jest potocznie zjawiskiem nadsterowności. Zachowanie pojazdu nadsterownego pokazuje drugi rysunek.
Przypadek drugi: Kąt bocznego znoszenia ogumienia kół tylnych jest mniejszy niż dla kół przednich.
Środek chwilowego obrotu O1wyznaczamy w ten sam sposób (czyli w miejscu przecięcia się prostopadłych do odchylonych wektorów prędkości). Jak widać w tym przypadku rzeczywisty promień zakrętu R1 (tzn. po uwzględnieniu zjawiska bocznego znoszenia) jest większy od promienia teoretycznego R. Następuje zatem rozszerzanie zakrętu. Zjawisko to nazywane jest potocznie zjawiskiem podsterowności. Zachowanie się pojazdu pod sterownego obrazuje rysunek prawy.
3. Wpływ kąta znoszenia na stateczność kierunkową.
Przypomnijmy sobie czym jest stateczność kierunkowa - jest to zdolność utrzymania przez pojazd kierunku jazdy na wprost i zdolność powracania układu do stanu równowagi. Ruch auta po prostej uważa się za stateczny jeżeli po chwilowym zaburzeniu (np. w postaci podmuchu bocznego wiatru) samochód powraca do ruchu prostoliniowego. Znając już pojęcia nad i podsterowności rozpatrzymy zachowanie się takich pojazdów właśnie przy jeździe na wprost i bocznym wietrze.
Przypadek pierwszy:
Ruch na wprost samochodu nadsterownego.
Samochód porusza się po prostym odcinku drogi. Jak widać z rysunku po prawej, środek chwilowego obrotu O' znajduje się po tej samej stronie co działanie wiatru (oznaczonego jako siła Fn). Środek chwilowego obrotu wyznacza się w miejscu przecięcia się prostych prostopadłych do wektorów prędkości osi przedniej i tylnej. Widać również, że składowa siły bezwładności Fby ma ten sam kierunek co siła naporu wiatru Fn, zatem będzie ona powiększać działanie siły naporu wiatru Fn. Występuje więc sumowanie się tych sił. Są one równoważone przez siły sprężystości poprzecznej opon.
Przypadek drugi:
Ruch na wprost samochodu pod sterownego.
W przypadku auta pod sterownego środek chwilowego obrotu O' znajdzie się po przeciwnej stronie niż działający na pojazd boczny wiatr, a zatem składowa siły bezwładności Fby będzie przeciwdziałać sile naporu wiatru Fn. Powoduje to powrót samochodu do kierunku jazdy na wprost po ustaniu impulsu wymuszającego (bocznego wiatru). Ruch będzie zatem stateczny. Siły przyczepności opon do jezdni równoważą różnicę między Fn a Fby.
Z porównania obu powyższych rysunków wynika, że samochód pod sterowny znów pokazuje swoją wyższość nad pojazdem nadsterownym. W rzeczywistości stateczność kierunkowa samochodu przy jeździe po prostej i po krzywiźnie zależy także od wielu cech konstrukcyjnych samochodu (rozstawu osi, konstrukcji ogumienia, konstrukcji zawieszenia przedniego i tylnego). Kierowalność i stateczność nie są stałymi cechami pojazdu, lecz zmieniają się w zależności od jego załadowania i rozkładu mas, a także prędkości. Warto także wspomnieć o tym, że opony radialne są bardziej odporne na boczne znoszenie niż opony diagonalne, co jest jednym z powodów ich stosowania w samochodach osobowych.
1.Koło swobodnie toczone
Sytuację koła swobodnie toczonego przedstawia poniższy rysunek. Koło znajduje się w ruchu jednostajnym pod działaniem siły poziomej F przyłożonej do osi. Gdyby nie występowało tarcie, koło ślizgałoby się. Ponieważ koło toczy się, stąd między nawierzchnią a kołem występuje reakcja wzdłużna Fx = F, która wywołuje moment na ramieniu promienia dynamicznego rd czyli Fx· rd zmuszający koło do obrotu. Moment ten musi być równoważony przez moment wypadkowej reakcji pionowych Z przesuniętej w stosunku do osi obrotu o wartość e, (Z · e) gdyż inne siły nie występują. Stan taki wynika z asymetrii nacisków. Ponieważ reakcja wzdłużna w miejscu styku opony z jezdnią jest równa sile przyłożonej do osi Fx=F, oraz Fx · rd = Z · e ,a wypadkowa reakcji pionowych Z jest równa obciążeniu osi (Z = Gk) to otrzymujemy po uproszczeniach wzór na siłę:
F = Fx w ruchu jednostajnym:
2.Koło napędzane
Aby mówić o przypadku koła napędzającego należy do niego przyłożyć moment napędowy Mn, jak to pokazano na rysunku. Zobaczmy co się dzieje. Siła F oraz reakcja Fx zmieniają zwroty na przeciwne niż to było w przypadku koła swobodnie toczonego. Z równania momentów względem osi pojazdu otrzymamy:
Oznaczenia są takie same jak w przypadku koła swobodnie toczonego. Dodatkowo występują:
Fn - siła napędowa
Ft - siła opór toczenia (wyprowadzona zresztą z przypadku koła swobodnie toczonego i równa Fx)
3.Koło hamowane
Jeśli zamiast momentu napędowego Mn przyłożymy do koła moment hamujący Mh to zamiast siły napędowej Fn wystąpi siła hamująca o zwrocie przeciwnym do siły napędowej Fn zgodnie z poniższym rysunkiem. Równanie momentów względem osi koła przybierze postać:
Oznaczenia są takie same jak w przypadku koła swobodnie toczonego (patrz pkt.1). Dodatkowo w przypadku koła hamowanego występują:
I = dw/dt - moment bezwładności koła
Fh - siła hamująca
Fbk - siła bezwładności koła
| Poleć ten artykuł | |
| Podziel się z innymi: |
|
| URL: |
Dodaj komentarz
Zaloguj się, aby móc dodać komentarz.
Oceny
Tylko zarejestrowani użytkownicy mogą oceniać zawartość strony
Zaloguj się lub zarejestruj, żeby móc zagłosować.
Zaloguj się lub zarejestruj, żeby móc zagłosować.
Brak ocen. Może czas dodać swoją?